| |







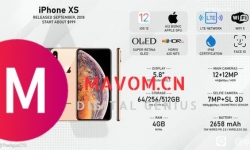
iPhone 12、 iPhone 12 Pro 、iPhone 12 Pro Max 的主要区别是什么... ...


iPhone 12 pro与iPhone 12 pro Max的区别有哪些?哪个更值得购买?_百度... ...


彭博社的 Mark Gurman 一直在分享有关苹果期待已久的 Siri 改革将包括和不包括哪些内容,Engadget 这条消息不只是在同 ...

26.4 的更新比最近几次更新更为重要,它会直接影响苹果产品线节奏、换机预期和生态功能落地。Ars Technica 这条消息不 ...
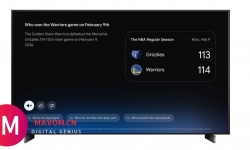
Google TV 即将上线由 Gemini 驱动的三项新功能,分别是视觉回答、深度解析和运动简报。相比一次常规功能更新,这次变 ...

OpenAI 正在对 Sora 进行产品整合。表面上看,这是一次旧服务下线;但更准确地说,这是一轮从 Sora 1 向 Sora 2 的迁 ...

Databricks 最近筹集了 50 亿美元资金,手握充足资源,正在通过收购进一步扩展其产品版图。此次收购的重点不只是“买 ...




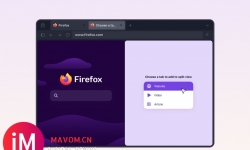
# Firefox 中的拆分视图:两个并排的选项卡,就在您需要的地方 > 来源:Mozilla Blog | 2026-03-24T03:00:00+08:00 ...

> 来源:TechCrunch | 2026-03-24T04:42:41+08:00 这条消息刚出来时,很多人第一眼可能只会看到表面更新。但如果往 ...
> 来源:TechCrunch | 2026-03-24T02:00:45+08:00 TechCrunch 最新披露的这条消息,把注意力拉回到“苹果 接下来 ...
> 来源:Ars Technica | 2026-03-24T05:19:51+08:00 这条消息刚出来时,很多人第一眼可能只会看到表面更新。但如果 ...
> 来源:Mozilla Blog | 2026-03-24T03:00:00+08:00 Mozilla Blog 最新披露的这条消息,把注意力拉回到“软件工具 ...
> 来源:The Verge | 2026-03-24T03:49:11+08:00 ![图片来源:The Verge] 放在今天的科技新闻里,这条不一定最炸, ...

[md]> 来源:GitHub Blog | 2026-03-24T00:00:00+08:00 ![图片来源:GitHub Blog]
来源:Ars Technica | 2026-03-24T02:34:59+08:00 图片来源:Apple Ars Technica 最新披露的这条消息,把注意力拉 ...


苹果的A12Z和A14到底哪个更强?iPad Air 4和iPad Pro 2020哪个更值得入手... ...

M1还是A12Z,有必要买iPad Pro 2021吗?还是直接买iPad Pro 2020?_百度... ...








































iphone18 由8GB升级为12GB内存 主摄升级为17Pro 主摄 搭载vc均热板 a20 2nm, 3nm? 硅碳负极电池? 提升电池密度 ...

齐齐哈尔斗山NHP8000机床钣金防护罩 齐齐哈尔斗山NHP8000钣金防护罩创新设计:庆云金恒兴的匠心突破 在重型数控机床领 ...

在消费电子、汽车、家电等高端制造领域,消费者对产品外观的精致度与功能性的要求日益严苛。传统表面装饰工艺因工序繁 ...

就我个人而言,电视机顶盒是我喜欢的影音产品之一,我强烈分享给所有希望在 4K 电视上获得流媒体画质的用户。当然,简 ...


离体心脏灌流系统是生命科学与医学研究领域的核心实验设备,专为离体哺乳动物心脏相关研究设计,同时能高效完成离体心 ...


用了三个月的AirPods Pro不幸掉了右耳,找不到了。准备小黄鱼买一只二手的配一对。 看到好多卖家都有大批量的二手airp ...

「WG402」1.5w出/出租王国钻14带专消24w财富9400w恶魔头白框尘翼银光姜饼人雪人钻石剪纸等套装钻石婚纱剪纸西域等上下 ...


最新版chrome在启用--force-renderer-accessibility浏览页面时会崩溃, 错误代码:STATUS_BREAKPOINT ...



实际上95z也支持这个功能。不懂为什么三星要把这个功能隐藏起来?无意中发现在设置界面把灵视竞技切换为自动,可以 ...

救救孩子吧 iPad密码错误太多次停用了 显示连接iTunes 我按照百度流程连接了 点更新提示我iTunes不是最新版本需要更新 ...

✨2025 美国产业用布及纺织品展,Advanced产业布年度盛会来袭,不可错过,冲鸭! 各位产业布行业的从业者们👋,今天 ...

蝙蝠最新版本Android&iOS 3.5.0已上线(可至官网下载https://www.batchat.com) 主要更以下功能: 一、新增水印相机功 ...





 微信扫一扫
微信扫一扫