|
kouzhaomao
2023-11-10 17:28:46
显示全部楼层
| |
| |

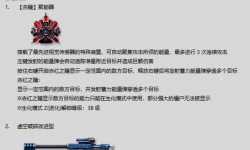
MacBook Pro 2016用parallels desktop20不法打开虚拟机,想抢救一下,有什么可以读取pvm文件的办法吗 ...



欢迎来到 4 月! 本贴将进行 4 月内 The Sims 各种官方信息的搬运,包括新闻、更新、补丁、官方推特等。 ...





Luluisland Winery 加拿大鹭岛酒庄,专注于生产果酒(蓝莓酒,树莓酒),VQA认证冰酒,以及优质葡萄酒等。 之前断货许 ...





steam游戏数据黑,游戏库中存有两百种类,十万个黑号。有需要的欢迎咨询微XinQing1030ya(新上线的游戏,以及Dayz, Ru ...




作为一名对音频世界满怀热忱、痴迷于探索各类耳机细微差异的发烧友,每一款新品耳机的发布都像是在我平静的音频探索 ...





如何在苹果内购开发中获取App Store Connect API密钥-共享密钥理解内购... ...



新鲜出炉的谷歌Pixel 10 Pro XL开箱!这次入手的曜石黑配色,高级感拉满。6.8英寸LTPO屏幕,刷新率自适应,滑动起来丝 ...

CN机构用AI工具日产300张主图,点击率反超人工设计28%!“2024设计师生存报告显示,仅掌握PS/C4D的设计师薪资降幅达17 ...




数据备份软件易备是一款轻量型的、功能强大应用灵活的Hyper-V 备份软件。它可以备份Microsoft Hyper-V虚拟机(可以采 ...


Anthropic【Claude模型】的中国客户都有谁? 大型互联网巨头:尤其是在分公司在美国、新加坡的那些互联网企业,如字节 ...


ETCR3690系列手持式回路电阻测试仪又名接触电阻测试仪,仪表采用微处理机技术,精密四线法测试,准确可靠。用于高压开 ...

齐鲁网·闪电新闻2月12日讯 2月12日,菏泽市牡丹区举办网络安全暨DeepSeek基础应用培训会。菏泽市网络安全专家王诏亮 ...





在网上找了很久,也在贴吧找了很久,看到相同型号的量产工具但是链接下不来。有说AlcorMP_v14.11.18.00这个版本可以用 ...

💻 金品GPU工作站总代理商重磅推荐:JINPIN 金品 KG4204 高性能4U服务器!在AI人工智能与大数据飞速发展的今天,选择 ...




在爱回s上买的一台y9000x2022验机报告上写的是win11系统拿到手是win10系统,然后触控板驱动也不好使,显卡驱动也没有 ...





许多玩家反应,入手switch oled后,在中低亮度下出现较为明显的频闪,猜测大概是任天堂使用了低频pwm调光策略,并且调 ...

之前配了台12400F+微星B669迫击炮主机,然后朋友送了一张玄人志向1080 插上点不了,DEBUG灯不报错,正常开机,就是显 ...






 微信扫一扫
微信扫一扫